

 联系我们
联系我们

本公司可供应焊接机器人,具体供应的服务范围有:
工博士专业集成安川焊接机器人|ABB焊接机器人|库卡焊接机器人|发那科焊接机器人|OTC焊接机器人|焊接机器人工作站|焊接机器人自动化服务|焊接设备|焊接机|焊接自动化|焊接自动化设备|管线包等。
ABB机器人常用型号:
ABB-IRB 120-3/0.58,ABB-IRB 1200-7/0.7,ABB-IRB 1200-5/0.9,ABB-IRB 1600-10/1.45,ABB-IRB 2600-20/1.65,ABB-IRB 4600-40/2.55,ABB-IRB 4600-60/2.05,ABB-IRB 6700-150/3.2,ABB-IRB 6700-200/2.6,ABB-IRB 1410-5/1.45,ABB-IRB 460/110/2.4,ABB-IRB 660-180/3.15,ABB-IRB 660-250/3.15,ABB-IRB 52,ABB-IRB 550,ABB-IRB 910,ABB-IRB360等。
本公司是ABB机器人代理,具体供应的服务范围有:
ABB机器人|ABB工业机器人|ABB机械臂|ABB机器人自动化项目|ABB机器人配件|ABB机器人备件|ABB机器人示教器|ABB机器人控制柜|ABB机器人线缆|ABB机器人维保|ABB机器人售后服务|ABB机器人技术支持|管线包等。
1. 通常在开阔而又无高精度要求的状况下,速度值设为V3000,通常自动化把这个速度界说为Vmax,(这个Vmax与OLP中Speed值可选项中的Vmax稍不同,理论中,机器人的Vmax应该等于V8000左右,但实践状况下,这个速度仅为3000mm/s左右),此刻与之对应的Zone值设置为z200—z500之间,过小的Zone值会形成机器人运动时分的停顿和扰动,特别是机器人负载较重的时分。
2. 焊接过程中,速度一般为V1000---V1500,有时分自动化也会把V1500这个速度界说为Vmid,此刻设置的Zone值一般为z5--z150之间。通常状况,在这个速度下,Zone值设置为z50;空间不太受限制,也可以把Zone加大到z150;在空间比较狭小的地方,z值设置为z5—z10;关于焊点,Zone值设置为fine。
3. 速度一般为V500以下,有时分自动化也会把V500这个速度界说为Vmin,这个速度一般在方位特别严重的状况和快换对接的方位点运用。
关于Wobj的设置:
一般来说,与工件有联络的机器人途径,才会设置与车型相关的wobj,如wobj-v212, wobj-w204等 ;而与工件无关的途径,选用的就是wobj0,这个wobj是与机器人相关的,在程序输出时,不会显示在程序段中。换句话说,就是与工件没有联络的途径,程序中不带wobj。
与工件相关的途径:包含机器人焊接途径和抓放工件的dock和undock途径。需要注意的是,在dock和undock途径的过程中,机器人不带抓手的部分,wobj选用的也是wobj0。
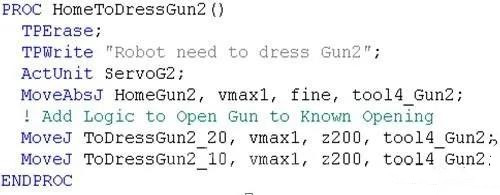
选用wobj0的途径,包含抓放途径,抓放抓手途径,从工件存放架上抓件的pickpart途径,修磨途径和其他服务途径。下图为机器人从home点到修磨方位的途径,可以看出程序中是不带wobj的。
需要注意的地方:假如模仿过程中加入了工件的wobj,在程序输出后不能直接把wobj删去。假如在调试过程中,需要把机器人走到位后,把wobj选项改为don’t use,然后手动操作的地方改为wobj0,*后修正点的方位,这样才干改回来。
关于机器人焊接参数spotdata的说明:
1. 关于气动焊,格式为:spotdata 编号A:=[1,1];其间[1,1]表明**把焊***,**套焊接参数。关于每一套参数,程序中不会体现压力电流值,由焊接操控柜直接操控。
2. 关于伺服焊,格式为:spotdata 编号A:=[a, b, c, d]; 其间[a, b, c, d]表明,第a套参数,压力为b,焊点处板厚为c,这套参数下板厚的公役为d。奔驰项目要求每一个焊点对应一套参数,所以公役d这一项为0。
关于spotdata的数值,在OLP模块下,无法设置到与实践状况一致,故需要在程序输出后做修正。
ABB机器人部分程序介绍:
